Robot - mis tahes automaatselt töötav masin, mis asendab inimese jõupingutusi, ehkki see ei pruugi välimuselt inimestele sarnaneda ega funktsioone inimlikult täita. Robootika on inseneriteadus, mis tegeleb robotite kavandamise, ehitamise ja kasutamisega.
Kunstlike inimeste mõiste eelnes salvestatud ajaloole (vt automaat), kuid tänapäevane termin robot tuleneb tšehhi sõnast robota (“sunnitöö” või “pärisorja”), mida on kasutatud Karel Čapeki näidendis RUR (1920). Näidendi roboteid toodeti inimestele, vabrikuomanikud kasutasid neid südamest, kuni nad mässasid ja inimkonna lõpuks hävitasid. Kas nad olid bioloogilised, nagu koletis Mary Shelley Frankensteinis (1818), või mehaanilised, ei täpsustatud, kuid mehaaniline alternatiiv inspireeris leiutajate põlvkondi elektriliste humanoidide ehitamiseks.


Sõna robootika ilmus esmakordselt Isaac Asimovi ulmeloos Runaround (1942). Koos Asimovi hilisemate robotilugudega seadis see uue usaldusväärsuse standardi intelligentsete robotite väljatöötamise tõenäoliste raskuste ja sellest tulenevate tehniliste ja sotsiaalsete probleemide kohta. Runaround sisaldas ka Asimovi kuulsaid robootika kolme seadust:
-
1. Robot ei tohi inimest vigastada ega lase tegevusetuse tõttu inimesel kahju saada.
-
2. Robot peab järgima inimeste antud korraldusi, välja arvatud juhul, kui sellised korraldused oleksid vastuolus esimese seadusega.
-
3. Robot peab kaitsma oma olemasolu, kui see pole vastuolus esimese ega teise seadusega.
See artikkel jälgib robotite ja robootika arengut. Tööstuslike rakenduste kohta lisateabe saamiseks lugege artiklit automatiseerimine.
Tööstuslikud robotid

Ehkki need pole vormis humanoidsed, on tööstuseks välja töötatud paindliku käitumisega ja mõnede inimlike füüsiliste omadustega masinad. Esimene statsionaarne tööstusrobot oli programmeeritav Unimate, elektrooniliselt juhitav hüdrauliline rasketõstehoob, mis võiks korrata suvalisi liigutusi. Selle leiutas 1954. aastal Ameerika insener George Devol ja selle töötas välja Unimation Inc., ettevõte, mille asutasid 1956. aastal Ameerika insener Joseph Engelberger. 1959. aastal tutvustati New Jersey osariigis Trentonis General Motors Corporationi survevalutehases Unimate prototüüpi. 1961. aastal edastas Condec Corp. (pärast eelmise aasta Unimationi ostmist) GM-i tehasesse maailma esimese tootmisliiniroboti; selle ülesandeks oli (inimestele) kõlbmatu ülesanne eemaldada kuumvaltsimismasinast kuumad metallosad ja virnastada need. Ebareaalseid relvi arendavad ja müüvad jätkuvalt litsentsisaajad kogu maailmas, kusjuures autotööstus on endiselt suurim ostja.


Andurite juhendatavad keerukamad arvutiga juhitavad elektrilised relvad töötati välja 1960. aastate lõpus ja 1970. aastate lõpus Massachusettsi tehnoloogiainstituudis (MIT) ja Stanfordi ülikoolis, kus neid kasutati kaameratega robotiseeritud käe-silma uurimisel. Stanfordi Victor Scheinman, kes töötab koos Unimation for GM-iga, kavandas esimese sellise tööstuses kasutatava käe. Neid nimetatakse PUMA-ks (programmeeritav universaalne seade kokkupanekuks) ja neid on alates 1978. aastast kasutatud auto alakomponentide, näiteks armatuurlaua ja tulede kokkupanekuks. PUMA-d jäljendati laialdaselt ning selle järeltulijaid, nii suuri kui ka väikeseid, kasutatakse endiselt kergmontaažiks elektroonikatööstuses ja muudes tööstusharudes. Alates 1990. aastatest on väikesed elektrilised relvad muutunud oluliseks molekulaarbioloogia laborites, mis käsitlevad täpselt katseklaasi massiive ja reagentide keeruliste järjestuste pipeteerimist.
Ka mobiilsed tööstusrobotid ilmusid esmakordselt 1954. aastal. Sel aastal hakkas Barrett Electronics Corporationi valmistatud juhita elektrikäru vedama Lõuna-Carolina toidupoe lasti. Sellised masinad, mida nimetatakse AGV-deks (automaatjuhtimisega sõidukid), navigeerivad tavaliselt betoonpõrandatesse kinnistunud signaali kiirgavate juhtmete abil. 1980-ndatel omandasid AGV-d mikroprotsessorikontrollerid, mis võimaldasid keerukamat käitumist kui lihtsate elektrooniliste juhtimisvõimaluste korral. 1990ndatel sai ladudes populaarseks uus navigatsioonimeetod: skaneeriva laseriga varustatud AGV-de triangulatsioon reguleerib nende asukohta fikseeritud helkurite peegelduste abil (millest vähemalt kolm peavad olema nähtavad igast kohast).
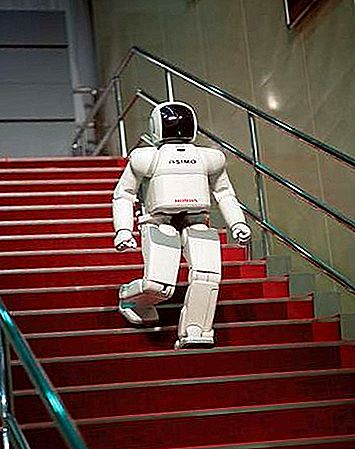
Ehkki tööstusrobotid ilmusid esmakordselt Ameerika Ühendriikidesse, ei arenenud seal äri. Unimatsiooni omandas Westinghouse Electric Corporation 1983. aastal ja suleti paar aastat hiljem. Cincinnati Milacron Inc. ainult järelejäänud Ameerika firma. Unimationi välismaised litsentsiaadid, eriti Jaapanis ja Rootsis, jätkavad tegevust ning 1980ndatel hakkasid jõuliselt turule Jaapani ja Euroopa teised ettevõtted. Vananeva elanikkonna väljavaade ja sellest tulenev töötajate nappus sundisid Jaapani tootjaid katsetama täiustatud automatiseerimist juba enne, kui see andis selge tulu, avades turu robotitootjatele. 1980ndate lõpuks oli Jaapan, mida juhtisid Fanuc Ltd, Matsushita Electric Industrial Company Ltd., Mitsubishi Group ja Honda Motor Company Ltd., robootikaosakonnad, maailmas tööstusrobotite tootmises ja kasutamises. Ka kõrged tööjõukulud Euroopas julgustasid robotite asendajate kasutuselevõttu, kuna Euroopa Liidus ületasid tööstuslike robotite installatsioonid esmakordselt Jaapani installatsioonid.












